GPS maksimalaus imtuvo aukščio apribojimai. GPS: sistemos veikimo principai ir koordinačių nustatymo tikslumas
Straipsnyje aptariamas GPS palydovinės padėties nustatymo sistemos (Global Positioning System) veikimo principas, sudėtis ir ypatybės.
Pasaulinės padėties nustatymo sistemos (GPS) navigacijos sistema yra NAVSTAR komplekso, kurį kuria, diegia ir eksploatuoja JAV Gynybos departamentas, dalis. Kompleksas NAVSTAR (navigacijos palydovai, teikiantis laiką ir diapazoną – navigacijos sistema, skirta laikui ir nuotoliui nustatyti) pradėtas kurti dar 1973 m., o jau 1978 m. vasario 22 d. buvo atliktas pirmasis bandomasis komplekso paleidimas, o kovo mėn. 1978 m. pradėjo veikti kompleksas NAVSTAR. Pirmasis bandomasis palydovas į orbitą buvo paleistas 1974 metų liepos 14 dieną, o paskutinis iš 24 palydovų, reikalingų visiškai uždengti žemės paviršių, buvo paleistas į orbitą 1993 metais. Civilinis NAVSTAR karinio palydovinio tinklo segmentas paprastai vadinamas GPS, komercinis sistemos veikimas dabartine forma prasidėjo 1995 m.
Praėjus daugiau nei 20 metų nuo bandomojo GPS sistemos paleidimo ir 5 metų nuo pasaulinės padėties nustatymo sistemos GPS komercinio veikimo pradžios, 2000 m. gegužės 1 d. JAV Gynybos departamentas atšaukė specialios sąlygos naudotis anksčiau buvusia GPS sistema. JAV kariuomenė išjungė trukdžius (SA – selektyvus prieinamumas), kuris dirbtinai sumažina civilinių GPS imtuvų tikslumą, o po to koordinačių nustatymo naudojant buitinius navigatorius tikslumas išaugo mažiausiai 5 kartus. Amerikiečiams panaikinus atrankinės prieigos režimą, koordinačių nustatymo tikslumas naudojant paprasčiausią civilinį GPS navigatorius svyruoja nuo 5 iki 20 metrų (aukštis nustatomas 10 metrų tikslumu) ir priklauso nuo signalo priėmimo sąlygų konkrečiame taške, matomų palydovų skaičiaus ir daugybės kitų priežasčių. Pateikti skaičiai atitinka signalo priėmimą iš 6-8 palydovų vienu metu. Dauguma šiuolaikinių GPS imtuvų turi 12 kanalų imtuvą, kuris leidžia vienu metu apdoroti informaciją iš 12 palydovų. NAVSTAR pagrindu veikiančios navigacijos karinės programos užtikrina didesnį tikslumą (iki kelių milimetrų) ir palaiko užšifruotą P(Y) kodą. Informacija C/A kodu (standartinis tikslumas), perduodama naudojant L1, platinama laisvai, nemokamai, be naudojimo apribojimų.
GPS sistemos pagrindas yra navigacijos palydovai, judantys aplink Žemę 6 apskritomis orbitinėmis trajektorijomis (kiekvienoje po 4 palydovus), 20 180 km aukštyje. GPS palydovai aplink Žemę skrieja kas 12 valandų, jų svoris orbitoje apie 840 kg, matmenys – 1,52 m pločio ir 5,33 m ilgio, įskaitant saulės elementai, sukurianti 800 vatų galią. 24 palydovai užtikrina 100% GPS navigacijos sistemos veikimą bet kuriame taške gaublys. Maksimalus galimas vienu metu veikiančių palydovų skaičius NAVSTAR sistemoje ribojamas iki 37. Šiuo metu orbitoje yra 32 palydovai, 24 pagrindiniai ir 8 atsarginiai gedimų atveju.

Orbitinis žvaigždynas stebimas iš pagrindinės valdymo stoties (MCS), esančios Schriever oro pajėgų bazėje, pc. Koloradas, JAV. Jis valdo GPS navigacijos sistemą pasauliniu mastu. Šriverio oro pajėgų bazėje yra 50-osios JAV kosmoso pajėgos, oro pajėgų vadovybės padalinys.
Antžeminę GPS sistemos dalį sudaro dešimt sekimo stočių, kurios yra Kwajalein ir Havajų salose Ramusis vandenynas, Ascension saloje, Diego Garcia saloje Indijos vandenynas, taip pat Kolorado Springse, Kanaverelio kyšulyje, pc. Florida ir tt Antžeminių stočių skaičius nuolat auga, visos sekimo stotys naudoja GPS imtuvus, kad pasyviai sektų visų palydovų navigacijos signalus. Informacija iš stebėjimo stočių apdorojama pagrindinėje valdymo stotyje MCS ir naudojama palydovų efemeriams atnaujinti. Navigacijos duomenys, kuriuos sudaro numatomos orbitos ir laikrodžio pataisymai, atsisiunčiami kiekvienam palydovui kas 24 valandas.
Koordinačių nustatymas ir GPS navigacija.
GPS imtuvo koordinačių nustatymo idėjos pagrindas yra apskaičiuoti atstumą nuo jo iki kelių palydovų, kurių vieta laikoma žinoma. GPS imtuvo vieta erdvėje nustatoma remiantis atstumo nuo stebėjimo taško iki palydovo matavimo algoritmu. Diapazonas pagrįstas atstumo nuo radijo signalo sklidimo iš palydovo iki imtuvo laiko delsos apskaičiavimu. Jei žinote radijo signalo sklidimo laiką, tada jo nukeliautą kelią galima nesunkiai apskaičiuoti. Imtuvai veikia pasyviuoju režimu ir skaičiuoja savo koordinates, tačiau tai nereiškia, kad GPS imtuvo koordinates žinos kas nors kitas, o ne jo savininkas. Kiekvienas GPS palydovas nuolat generuoja dviejų dažnių radijo bangas – L1=1575,42 MHz ir L2=1227,60 MHz. Kiekvienas GPS imtuvas turi savo generatorių, veikiantį tuo pačiu dažniu ir moduliuojantį signalą pagal tą patį dėsnį kaip ir palydovo generatorius. Taigi pagal delsos trukmę tarp identiškų iš palydovo gauto ir nepriklausomai generuojamo kodo sekcijų galima apskaičiuoti signalo sklidimo trukmę, taigi ir atstumą iki palydovo.
Pagrindinė problema skaičiuojant atstumą iki GPS palydovo yra susijusi su palydovo ir imtuvo laikrodžių sinchronizavimu. Net maža klaida gali sukelti didžiulę klaidą nustatant atstumą. Kiekviename palydove yra didelio tikslumo atominiai laikrodžiai, kurių negalima įmontuoti į įprastą GPS imtuvą. Siekiant koreliuoti laiko nesutapimą ir išvengti didžiulių padėties nustatymo klaidų, GPS sistema įdiegia perteklinio principo principą trimatėms koordinatėms Žemės paviršiuje nustatyti. GPS imtuvas naudoja ne trijų, o mažiausiai keturių palydovų signalus ir, remdamasis pagalbiniais signalais, atlieka visus reikiamus laikrodžio veikimo reguliavimus. Be navigacijos signalų, palydovas nuolat perduoda įvairią paslaugų informaciją. GPS imtuvas gauna, pavyzdžiui, efemeridus (tikslius duomenis apie palydovo orbitą), radijo signalo sklidimo jonosferoje vėlavimo prognozę, taip pat informaciją apie palydovo veikimą (vadinamasis „almanachas“, kurioje yra informacija apie visų palydovų būseną ir orbitas, atnaujinama kas 12,5 minutės). Šie duomenys perduodami 50 bps L1 arba L2 dažniais.
Atstumą iki GPS sistemos navigacijos palydovų pažymėkime A, B ir C. Tarkime, kad atstumas A iki vieno palydovo yra žinomas. Tokiu atveju GPS imtuvo koordinatės negali būti nustatytos, nes jis gali būti bet kuriame sferos taške, kurio spindulys A apribotas aplink palydovą. Jei žinomas imtuvo atstumas B nuo antrojo palydovo, tada koordinačių nustatymas taip pat neįmanomas - objektas yra kažkur ant apskritimo (rodomas mėlynai), kuris yra dviejų sferų susikirtimas. Žinomas atstumas C iki trečiojo palydovo sumažina koordinačių neapibrėžtį iki dviejų taškų (pažymėtų raudonais taškais). To jau pakanka vienareikšmiškai nustatyti GPS imtuvo koordinates. Nepaisant to, kad turime du taškus su koordinatėmis, tik vienas yra Žemės paviršiuje, o antrasis, klaidingas, pasirodo esantis arba giliai Žemės viduje, arba labai aukštai virš jos paviršiaus. Taigi teoriškai trimatei GPS navigacijai pakanka žinoti atstumus nuo imtuvo iki trijų palydovų, tačiau, kaip jau minėjome, GPS imtuvas naudoja signalus ne iš trijų, o iš mažiausiai keturių palydovų ir, remiantis pagalbinius signalus, atlieka visus reikiamus reguliavimus, kad pagerintų navigacijos tikslumą.
GPS navigacijos trūkumai yra tai, kad tam tikromis sąlygomis signalas gali nepasiekti GPS imtuvo, todėl tiksliai nustatyti savo buvimo vietą giliai bute gelžbetoninio pastato viduje, rūsyje ar tunelyje beveik neįmanoma. GPS veikimo dažnis yra radijo bangų decimetro diapazone, todėl po tankia medžių lapija, tankiose miesto vietose arba dėl gausaus debesuotumo gali pablogėti signalo iš palydovų priėmimo lygis, o tai turės įtakos padėties nustatymo tikslumui. Magnetinės audros ir antžeminiai radijo šaltiniai taip pat gali trukdyti normaliam GPS signalų priėmimui. GPS navigacijai sukurti žemėlapiai greitai pasensta ir gali būti netikslūs, todėl reikia pasitikėti ne tik GPS imtuvo duomenimis, bet ir savo akimis. Ypač verta paminėti, kad pasaulinės GPS navigacijos sistemos veikimas yra visiškai priklausomas nuo JAV gynybos departamento ir negali būti tikras, kad JAV bet kuriuo metu neįjungs trukdžių (SA – selektyvus prieinamumas) ar net visiškai išsijungs. civilinis GPS sektorius tiek konkrečiame regione, tiek apskritai. Jau buvo pretendentų. Laimei, GPS turi alternatyvą – GLONASS (Rusija) ir Galileo (ES) navigacijos sistemas, kurios ateityje turėtų tapti plačiai paplitusios.
Rusijos Federacijos švietimo ir mokslo ministerija
Federalinė valstybinė autonominė aukštojo profesinio mokymo įstaiga „Uralo federalinis universitetas, pavadintas pirmojo Rusijos prezidento B. N. Jelcino vardu“
Radioelektronikos institutas ir informacines technologijas– RTF
Informacinių sistemų radioelektronikos katedra
GPS (pasaulinė padėties nustatymo sistema)
Santrauka apie discipliną „Įvadas į kryptį“
Data 2013-10-28
Mokytojas ____________________________ (Ivanovas Viačeslavas Elizbarovičius)
Studentas _____________________________________ (Akhtarovas Danilas Nadirvičius)
Grupė RI-130801
Įvertinimas _________
Jekaterinburgas
Įvadas
|
Kūrybos istorija……………………………………………………………… | ||
|
GPS sistemos veikimo principas………………………………………………………………… | ||
|
Koordinačių nustatymo principo esmė………………………………… | ||
|
GPS navigacijos signalai………………………………………………………………….. | ||
|
Koordinačių nustatymo tikslumas GPS sistemose…………………………… | ||
|
Alternatyvūs GPS įrenginiai……………………………………………………………… |
Išvada
Taikymas
Bibliografija
Įvadas
GPS yra angliškos Global Positioning System santrumpa, išversta į rusų kalbą kaip pasaulinė padėties nustatymo sistema. Ši sistema leidžia nustatyti savo koordinates. Jį sudaro palydovų grupė – 24 vienetai. Ši grupė vadinama NAVSTAR. Palydovai kabo ne virš vieno taško planetoje, o juda Žemės paviršiaus atžvilgiu. Taip pat padėties nustatymo sistemoje yra įžeminimo korekcijos stotys. Projektas buvo įgyvendintas ir priklausė JAV kariniam departamentui ir iš pradžių buvo skirtas tik kariniams tikslams. Pagrindinis projekto tikslas – didelio tikslumo įvairių judančių ir statinių objektų pozicionavimas ant žemės. Tai palengvina atstumo, laiko ir vietos matavimas WGS 84 pasaulio koordinačių sistemoje.
Palydovinė padėties nustatymo sistema (GPS) yra JAV sukurta sistema, pagrįsta radijo reljefo navigacija, kuri nepertraukiamai teikia patikimas vietos, navigacijos ir laiko nustatymo paslaugas civiliams naudotojams. tarptautiniu pagrindu- nemokama prieiga visiems. Visiems, turintiems GPS imtuvą, sistema suteiks galimybę nustatyti vietą ir laiką.
GPS susideda iš trijų dalių: palydovų, skriejančių aplink Žemę; valdymo ir stočių Žemėje; ir naudotojams priklausančius GPS imtuvus. GPS palydovai perduoda signalus iš vietos, kurią nustato ir atpažįsta GPS imtuvai. Tada kiekvienas GPS imtuvas pateikia trimatę vietą (platumą, ilgumą ir aukštį) ir laiką. Žmonės gali įsigyti mobiliųjų telefonų su GPS, kuriuos galima įsigyti per komercinių mažmenininkų tinklą. Vartotojai, turintys GPS imtuvą, pagal iš anksto pasirinktą maršrutą gali tiksliai nustatyti vietą ir lengvai nustatyti, kur eiti toliau.
GPS tapo pagrindine transporto sistemų visame pasaulyje atrama, teikiančia aviacijos, sausumos transporto ir jūrų ryšių navigaciją. Pagalba nelaimių ir nelaimių metu. GPS padeda avariniams gelbėtojams nustatyti gelbėjimo misijų vietą ir laiką. Kasdienės veiklos, tokios kaip bankininkystė, mobiliojo telefono operacijos ir net elektros perdavimo tinklo stebėjimas, palengvina tikslus GPS suteikiamas laikas. Naudodami GPS signalus ūkininkai, geodezininkai, geologai ir daugybė kitų ekspertų savo darbą atlieka efektyviau, saugiau ir ekonomiškiau.
Šio rašinio tikslas – apžvelgti tokius klausimus kaip: GPS istorija, GPS veikimo principai, jų praktinio panaudojimo poreikis ir svarba.
Žurnalas "Kapitonų klubas" Nr. 2, 1999 Straipsnio kopija publikuojama sutikus redakcijai.
Šis įrašas dar kartą paliečia GPS temą. Deja, daugelio vietinių leidinių straipsniai nepateikia pakankamai informacijos apie sistemos sandarą ir imtuvo rodmenų tikslumo laipsnį. Daugeliui laivininkų kyla klausimas: ar instrumentais galima aklai pasitikėti, ar jie turėtų būti suvokiami tik kaip priedas prie tradicinių padėties nustatymo metodų? Ir kodėl jachtos įrengtos tokiais pat šiuolaikinėmis priemonėmis navigacija, kartais atsiduri ant akmenų toli nuo numatyto kurso? Šiame straipsnyje bandoma apibendrinti informaciją, kuri, autoriaus nuomone, gali padėti GPS naudotojams.
"Visa navigacinė įranga gaminama ir parduodama tik kaip pagalbinė navigacijos priemonė. Naudotojas yra atsakingas už savo navigacijos įgūdžių tobulinimą, nepaisant įsigytos įrangos."
(Iš naudojimo vadovo.)
Kaip veikia ir veikia GPS sistema
NAVSTAR GPS (Navigation Satellite Timing And Ranging Global Positioning System) koncepcija pradėta kurti 1973 m. Tuo metu moderniausios radijo navigacijos sistemos (RNS), antžeminės Loran-C ir Omega bei palydovinis (SNS) Transit, nebėra atitiko kariuomenės tikslumo ir pajėgumo bet kokiomis oro sąlygomis, visą parą veikimo ir aprėpties zonos reikalavimus. 1978 m. vasarį buvo paleistas pirmasis eksperimentinis GPS palydovas. APIE civilinis ieškinys GPS tapo plačiai žinomas 1983 m., kai virš Kurilų salų numuštas Pietų Korėjos lėktuvas. Prezidentas Reiganas pareiškė, kad GPS turėtų būti prieinamas visiems.
GPS sistema teikia dviejų tipų paslaugas: SPS – standartinio tikslumo (civiliams vartotojams) ir PPS – didelio tikslumo (kariniams vartotojams). Kuriant sistemą buvo manoma, kad civiliniams tikslams pakanka 100 m SPS tikslumo. Vykstant bandymams SPS posistemis pasirodė tikslesnis nei tikėtasi. Siekiant išlaikyti didelio tikslumo pranašumą kariškiams, nuo 1990 m. kovo mėn. buvo įvestas SA (Selective Availability) „prieigos apribojimo“ režimas, dirbtinai sumažinantis civilių GPS tikslumą.
Sistema gavo ugnies krikštą operacijos „Dykumos audra“ metu. Tuo metu dar nebuvo paleista pakankamai palydovų. Reikėjo manevruoti esamus, kad būtų užtikrintas kovos zonos aprėptis visą parą. Įdomu tai, kad 1989 m. rugsėjį MAGELLAN SYSTEMS CORP. Kariniams tikslams išleido GPS imtuvą „NAV-1000M“, o imtuvų tiekėju pasirinko 10 NATO šalių narių. Persijos įlankos karą JAV ir koalicijos pajėgos naudojo daugiau nei 3000 NAV-1000M imtuvų. Tada antžeminiai vienetai ir jūrų pėstininkai daugiausia buvo aprūpinti nešiojamaisiais vieno kanalo imtuvais, panašiais į civilinius, ir negalėjo priimti didelio tikslumo signalų. Mūšio metu buvo nuspręsta išjungti SA režimą, todėl priešas taip pat galėjo naudoti didelį tikslumą.
1993 m. viduryje orbitoje jau buvo 24 palydovai, kurių pakako nuolatinei navigacijai bet kurioje Žemės vietoje. Apie galutinį sistemos paleidimą buvo pranešta tik 1995 metų liepą.
1996 m. prezidentas Clintonas patvirtino, kad sistema, kurią maitina Amerikos mokesčių mokėtojai, ir toliau teiks paslaugas civiliams vartotojams visame pasaulyje ir kitą šimtmetį. Buvo paskelbta, kad iki 2006 m. bus panaikintas „prieigos apribojimo“ režimas. Jungtinių Valstijų prezidentas pasilieka teisę sumažinti GPS signalų tikslumą iškilus grėsmei nacionaliniam saugumui.
GPS sistema susideda iš trijų dalių: erdvės, antžeminės ir vartotojo įrangos.
Kosmoso dalis susideda iš 24 palydovų, besisukančių 6 orbitomis. Orbitų pokrypis į žemės pusiaują – 55 laipsniai, kampas tarp orbitos plokštumų – 60 laipsnių. Orbitų aukštis 20180 km, orbitinis periodas 12 val.. Palydovinio siųstuvo galia 50 W. Pristačius patobulintus palydovus, dažni signalo praradimai liko praeityje. GPS palydovai gali užpildyti sistemos spragas judėdami (jei vienas iš jų sugenda). Svarbus elementas Palydovai yra atominiai laikrodžiai, rubidžio ir cezio, po keturis kiekviename. Palydovai atpažįstami pagal PRN (pseudo atsitiktinį skaičių), kuris rodomas GPS imtuve.
Antžeminę GPS dalį sudaro 4 sekimo stotys, esančios tropinėse salose. Jie seka matomų palydovų ir perduoti duomenis į pagrindinę komandų ir valdymo stotį (MCS) Kolorado Springso oro pajėgų bazėje, kad būtų galima apdoroti sudėtinguose kompiuterių programinės įrangos modeliuose. Šie duomenų rinkiniai vadinami efemeriais. Per antžemines stotis duomenys perduodami atgal į palydovus, o po to palydovas juos perduoda GPS imtuvams.
GPS SIGNALAS
Visi dažniai įvesti GPS sistema palydovo pagrindinio laikrodžio dažnio, 10,23 MHz, kartotiniai. Palydovas perduoda signalus L1=1575,42 MHz ir L2=1227,6 MHz juostose. Signaluose yra dviejų tipų informacija: „navigacijos pranešimai“ ir „pseudoatsitiktinis kodas“. Kodas yra vienetų ir nulių seka, iš pirmo žvilgsnio atrodytų atsitiktinė, bet besikeičianti pagal sudėtingą dėsnį. Pseudoatsitiktiniame kode yra palydovo numeris (PRN).
Yra dviejų tipų kodai. Civilinis GPS naudoja C/A (angl. Coarse Acquisition) – kodą, perduodamą tik L1 dažniu. Vienas kodo ciklas susideda iš 1023 bitų ir kartojamas 1000 kartų (sek. Karinis didelio tikslumo GPS naudoja P kodą (Precise), kuris perduodamas abiem L1 ir L2 dažniais.
Navigacijos pranešimai perduodami 50 bitų/sek greičiu papildomai moduliuojant nešlio dažnį pagal pseudoatsitiktinį kodą. Kiekvienas pranešimas susideda iš 25 „gabalų“ (puslapių), kurių kiekvienas yra 1500 bitų. Visas viso pranešimo perdavimo ciklas trunka 12,5 minutės. Navigacijos pranešimas apima „efemerido duomenis“ ir „almanacho duomenis“; duomenys apie laiką GPS sistemoje ir jo konvertavimo į visuotinį laiką koeficientai, P kodo raktiniai žodžiai ir specialūs pranešimai. Efemeridai – tai duomenys apie palydovo būklę ir jo orbitos parametrus – koeficientai, kurių pagalba imtuvas apskaičiuoja esamą ir būsimą palydovo padėtį, naudodamas matematinį Keplerio modelį. Be to, šiuose pranešimuose yra palydovinių laikrodžių ir jonosferos sklidimo delsos koeficientai C/A kodo naudotojams. Almanachas yra duomenys apie efemeriją ir likusių sistemoje palydovų būklę (saugomi imtuvo atmintyje). Dėl šių duomenų imtuvas visada „žino“, kur yra visi sistemos palydovai, net kai jų nemato, ir kokius palydovus geriausia naudoti koordinatėms nustatyti.
Kaip GPS imtuvas nustato savo padėtį?
GPS sistema naudoja atstumo iki palydovinių orientyrų nustatymo metodą, kuris nustatomas naudojant pseudoatsitiktinį kodą. Norėdami tai padaryti, imtuvas tuo pačiu metu sugeneruoja savo vidinį kodą, kad jis tiksliai dubliuotų palydovo kodą. Imtuvas lygina laiko skirtumą tarp atitinkamos palydovinio kodo dalies gavimo su ta pačia savo kodo dalimi. Žinodamas laiko poslinkį ir radijo bangų sklidimo greitį, imtuvas nustato atstumą iki palydovo, vadinamą pseudoatstumu, ir gali nustatyti tikslią jo padėtį iš dviejų atstumų. Kodėl "pseudo"? Problema yra užtikrinti, kad imtuvo ir palydovo pseudoatsitiktiniai kodai būtų generuojami tuo pačiu metu. Iš palydovo pusės čia nėra jokių sunkumų. Palydovo laikrodžiai yra labai tikslūs ir reguliuojami pagal signalus iš Žemės. Imtuvo laikrodis yra ne toks tikslus, be to, atsiranda signalo sklidimo vėlavimų jonosferoje, troposferoje ir kt. sukurti suvestinės klaidą. Norėdami tai ištaisyti, GPS naudoja nuotolio matavimus iš trečiojo palydovo.
Nustatydamas dvimates koordinates išilgai dviejų vienodo atstumo apskritimų, imtuvas „nežino“, ar jis iš tikrųjų yra ant jų, ar ne. Pavyzdžiui, jei imtuvo laikrodis lėtas, tikroji padėtis bus arčiau, bet kiekvienu atveju proporcingai arčiau kiekvieno iš palydovų. Įvedę padėties liniją iš 3-iojo palydovo, galime gauti vienareikšmį rezultatą. GPS imtuvas turi programą, kuri paima trijų padėties linijų informaciją ir ją išsprendžia algebriškai. Šie skaičiavimai pateikia trijų nežinomųjų lygčių: ilgumos, platumos ir laikrodžio paklaidos sprendimus. Štai kodėl 2D koordinatėms nustatyti reikia mažiausiai 3 palydovų, o 3D – 4.
Apie tikslumą
GPS vartotoją domina tikrasis sistemos tikslumas; kitaip tariant, kaip arti galite pasiekti navigacijos pavojų, pasikliaujant tik GPS imtuvu? Deja, aiškaus atsakymo į šį klausimą nėra. Taip yra dėl statistinio GPS klaidos pobūdžio.
GPS KLAIDŲ PRIEŽASTYS
SA režimas
Taikos metu prideda kelių dešimčių metrų paklaidą; Ypatingais atvejais gali būti šimtų metrų paklaidos. (Už sistemos veikimą milijonams vartotojų yra atsakinga JAV vyriausybė, todėl galima tikėtis, kad toks didelis tikslumo sumažinimas nebus atliktas be pakankamai rimtų priežasčių.) Pasiekta chaotiškai keičiant pseudoatsitiktinio perdavimo laiką. kodas. Klaidos, kylančios iš SA, yra atsitiktinės ir vienodai tikėtinos kiekviena kryptimi. SA taip pat turi įtakos GPS krypties ir greičio tikslumui. Dėl šios priežasties stacionarus imtuvas dažnai rodys šiek tiek skirtingą greitį ir kryptį. Taigi tam tikru mastu SA poveikio mastą galima įvertinti pagal periodinius GPS krypties ir greičio pokyčius. Radijo bangų sklidimo vėlavimas jonosferoje ir troposferoje
Radijo bangų greitis vakuume yra pastovus, tačiau kai signalas patenka į atmosferą, jis pasikeičia. Signalų iš skirtingų palydovų delsa skiriasi. Radijo bangų sklidimo klaidos priklauso nuo atmosferos būklės ir palydovo aukščio virš horizonto: kuo žemesnis palydovas, tuo ilgesnį kelią jo signalas nukeliauja per atmosferą ir tuo didesnis iškraipymas. Dauguma imtuvų neleidžia naudoti signalų iš palydovų, kurių aukštis virš horizonto yra mažesnis nei 7,5 (. Atmosferos trukdžiai priklauso ir nuo paros laiko: po saulėlydžio jonosferos tankis ir jo įtaka radijo signalams mažėja (reiškinys gerai žinomi trumpųjų bangų radijo operatoriams). Atsispindėjusio signalo įtaka ( Multipath)
Be tiesioginio signalo iš palydovo, imtuvas taip pat gali priimti signalus, atsispindinčius nuo uolų, pastatų ir praplaukiančių laivų. Jei tiesioginį signalą iš imtuvo blokuoja antstatai arba takelažas, atspindėtas signalas gali būti stipresnis. Šis signalas nukeliauja ilgesnį kelią, o imtuvas „mano“, kad jis yra toliau nuo palydovo, nei yra iš tikrųjų. Šios paklaidos yra daug mažesnės nei 100 m, nes tik arti esantys objektai gali suteikti pakankamai stiprų aidą.
Palydovinė geometrija
Priklauso nuo vietos, palyginti su palydovų imtuvu, pagal kurį nustatoma padėtis. Jei imtuvas „pagavo“ keturis palydovus ir jie visi yra šiaurėje, vadinasi, palydovo geometrija yra bloga. Rezultatas – iki 90-150 m paklaida ar net nesugebėjimas nustatyti koordinačių. (Visi keturi matmenys yra iš tos pačios krypties, o jų susikirtimo plotas yra per didelis;)
Naudojant tuos pačius 4 palydovus, tikslumas žymiai padidėja, jei jie yra tolygiai išdėstyti horizonto šonuose. Šiuo atveju net su SA tikslumas siekia 30 m ir daugiau.
Palydovo geometrija matuojama PDOP (Position Dilution Of Precision) arba HDOP (Horizontal Dilution Of Precision) koeficientu. Ideali palydovų vieta atitinka PDOP=1; didelės vertės kalbėti apie prastą palydovo geometriją. PDOP naudojamas kaip kitų klaidų daugiklis. Kiekvienas imtuvo išmatuotas pseudoatstumas turi savo paklaidą, priklausomai nuo atmosferos trukdžių, efemerų, SA klaidų, atspindėto signalo ir kt. Taigi, jei numatomos šių paklaidų vertės sudaro 50 m, o PDOP = 1,5, tada tikėtina padėties paklaida bus 75 m.
GPS imtuvai informaciją pateikia skirtingai, kad įvertintų tikslumą naudodami PDOP. Be HDOP, naudojamas GQ (geometrinė kokybė, atvirkštinė HDOP) arba kokybinis įvertinimas taškais. Daugelis šiuolaikinių imtuvų rodo EPE (apskaičiuotą padėties klaidą) tiesiai atstumo vienetais. EPE atsižvelgia į palydovų vietą ir signalo klaidų prognozę kiekvienam palydovui, priklausomai nuo SA, atmosferos sąlygų, palydovo laikrodžio klaidas, perduodamas kaip efemerinės informacijos dalis.
Palydovo geometrija taip pat tampa problema, kai naudojama GPS imtuvas viduje Transporto priemonė, tankiame miške, kalnuose, šalia aukšti pastatai. Kai signalai iš atskirų palydovų bus blokuojami, likusių palydovų padėtis lems, kiek tiksli bus GPS padėtis (o jų skaičius parodys, ar padėtį apskritai galima nustatyti).
Geras GPS imtuvas parodys ne tik kurie palydovai yra naudojami, bet ir kur jie yra (azimutą ir aukštį), todėl galėsite nustatyti, ar tam tikram palydovui kyla sunkumų.
Kiekybinis tikslumas
Paprastas testas, norint aiškiai pamatyti GPS imtuvo tikslumą, yra periodiškai įrašyti rodmenis iš stacionaraus imtuvo pakankamai ilgą laiką. Pavyzdžiui, kartą per 2 minutes. per dieną. Tai padaryti lengviau, jei turite braižytuvą arba kompiuterį, prijungtą prie GPS. Nubraižę gautas koordinates planšetėje, gauname vaizdą.
Manoma, kad GPS padėties pasiskirstymas gana gerai atitinka įprastą (Gauso) dėsnį. Tai skirta daugiau matavimo paklaida arba sisteminė paklaida lygi nuliui. Civilinis GPS užtikrina tikslumą be SA 15 metrų RMS, o SA režimu 2DRMS=100 m. Ką tai reiškia? RMS (Root Mean Square) – kvadratinė šaknis iš ilgumos ir platumos nuokrypių kvadratų sumos, padalytos iš matavimų skaičiaus. 65% taškų patenka į RMS spindulio apskritimą. 2DRMS reiškia dvigubą RMS. Erdvinio dvimačio Gauso skirstinio atveju 95% taškų patenka į intervalą plius arba minus 2DRMS, jei pasiskirstymas yra elipsinis (įvairios platumos ir ilgumos paklaidos), o su apskritimu - iki 98%. GPS padėties pasiskirstymas tampa elipsinis, jei dangus iš vienos pusės uždarytas signalams.
GPS ir „Problema-2000“
GPS valdymas žada, kad visos antžeminės tarnybos bus pilnai parengtos, o ši problema neturės įtakos palydovų signalų perdavimui. Kitas svarbus GPS sistemos įvykis, žinomas kaip „GPS sistemos laiko keitimas“, įvyks 1999 m. rugpjūčio 21–22 d. vidurnaktį, kai baigsis 1024 savaičių trukmės palydovinės navigacijos pranešimų keitimo ciklas ir iš naujo prasidės atgalinis skaičiavimas.
Daugumos šiuolaikinių imtuvų gamintojai teigia, kad jų gaminiai yra apsaugoti nuo šių problemų, tačiau dėl saugumo senesnių GPS modelių savininkams patariama pasitarti su tiekėjais. Autorius mano, kad po 1999 m. rugpjūčio 22 d. ir gruodžio 31 d. vidurnakčio (Grinvičo laiku) turėtumėte tuo pačiu metu patikrinti GPS rodmenų teisingumą naudodami kitas navigacijos priemones. Ypač jei imtuvas rodo neteisingą datą ar laiką.
IŠVADA
Didžiąją laiko dalį teikia GPS didelis tikslumas, kelių dešimčių metrų atstumu, o to visiškai pakanka navigacijai įprastomis sąlygomis. Tačiau vartotojui svarbu, kad kai kuriais momentais galimi nukrypimai iki kabelio ilgio ar daugiau. Tokių klaidų tikimybė yra labai maža, tačiau jos negalima pamiršti. Visada rekomenduojama naudoti daugiau nei vieną navigacijos įrankį. Spręsdami dėl GPS rodmenų pasitikėjimo laipsnio, galite atsižvelgti į šiuos požymius:
Imtuvo informacija apie palydovų buvimo vietą. Su nepalankiu deriniu galimos didžiausios klaidos aukščiausios vertės veiksnius, turinčius įtakos tikslumui ir, visų pirma, palydovo geometrijai. Jūsų imtuve, kuris paprastai rodydavo EPE 20-40 m, atsirasdavo 60 m ar daugiau.);
dangaus matomumas virš imtuvo antenos;
GPS padėties pasikeitimas per praėjusį laikotarpį (klojimas atliktas dideliu mastu);
kurso ir greičio atitikimas pagal GPS kompaso ir žurnalo rodmenis;
objektų, atspindinčių signalą, buvimas.
Be to, tikslinga tai pasakyti koordinačių sistemosžemėlapiai (Map Datum), susieti su skirtingi modeliaiŽemės elipsoidas, naudojamas kuriant žemėlapius įvairios šalys. Skirtumas tarp jų gali siekti 500 m.. Dirbdamas su GPS ir žemėlapiu vartotojas turi į tai atsižvelgti ir atlikti atitinkamus koregavimus. Ir paskutinis dalykas. Anksčiau buvo atsižvelgta tik į paties GPS imtuvo tikslumą. O maksimalios navigacijos klaidos naudojant GPS yra sumuojamos iš didžiausių visos grandinės klaidų: palydovai – imtuvas – vartotojas – žemėlapis – vartotojas. Už pagalbą rengiant medžiagą autorius dėkoja įmonėms NAVICOM, TRANSAS MARINE, ALTAIR ir p. Peter Dan (Teksaso valstijos universitetas), (www,.host.cc.utexas.edu.ftp?pub/grg/gcraft / pastabos/gps/gps.html). Leidinys parengtas remiantis medžiaga iš interneto ir Dahl, Bonnie. GPS naudotojo vadovas – pasaulinė padėties nustatymo sistema. Richardson Marine Publishing, 1993 m.
Aleksandras Samoilovas
Žurnalas „Kapitonų klubas“ Nr.2, 1999 m
Straipsnio kopija publikuojama sutikus redakcijai.
Šis įrašas dar kartą paliečia GPS temą. Deja, daugelio vietinių leidinių straipsniai nepateikia pakankamai informacijos apie sistemos sandarą ir imtuvo rodmenų tikslumo laipsnį. Daugeliui laivininkų kyla klausimas: ar instrumentais galima aklai pasitikėti, ar jie turėtų būti suvokiami tik kaip priedas prie tradicinių padėties nustatymo metodų? Ir kodėl jachtos, aprūpintos šiomis moderniausiomis navigacijos priemonėmis, kartais atsiduria ant akmenų toli nuo numatyto kurso? Šiame straipsnyje bandoma apibendrinti informaciją, kuri, autoriaus nuomone, gali padėti GPS naudotojams.
"Visa navigacinė įranga gaminama ir parduodama tik kaip pagalbinė navigacijos priemonė. Naudotojas yra atsakingas už savo navigacijos įgūdžių tobulinimą, nepaisant įsigytos įrangos."
(Iš naudojimo vadovo.)
Kaip veikia ir veikia GPS sistema
NAVSTAR GPS (Navigation Satellite Timing And Ranging Global Positioning System) koncepcija pradėta kurti 1973 m. Tuo metu moderniausios radijo navigacijos sistemos (RNS), antžeminės Loran-C ir Omega bei palydovinis (SNS) Transit, nebėra atitiko kariuomenės tikslumo ir pajėgumo bet kokiomis oro sąlygomis, visą parą veikimo ir aprėpties zonos reikalavimus. 1978 m. vasarį buvo paleistas pirmasis eksperimentinis GPS palydovas. Civilinis GPS naudojimas buvo plačiai aptartas 1983 m., kai virš Kurilų salų numuštas Pietų Korėjos lėktuvas. Prezidentas Reiganas pareiškė, kad GPS turėtų būti prieinamas visiems.
GPS sistema teikia dviejų tipų paslaugas: SPS – standartinio tikslumo (civiliams vartotojams) ir PPS – didelio tikslumo (kariniams vartotojams). Kuriant sistemą buvo manoma, kad civiliniams tikslams pakanka 100 m SPS tikslumo. Vykstant bandymams SPS posistemis pasirodė tikslesnis nei tikėtasi. Siekiant išlaikyti didelio tikslumo pranašumą kariškiams, nuo 1990 m. kovo mėn. buvo įvestas SA (Selective Availability) „prieigos apribojimo“ režimas, dirbtinai sumažinantis civilių GPS tikslumą.
Sistema gavo ugnies krikštą operacijos „Dykumos audra“ metu. Tuo metu dar nebuvo paleista pakankamai palydovų. Reikėjo manevruoti esamus, kad būtų užtikrintas kovos zonos aprėptis visą parą. Įdomu tai, kad 1989 m. rugsėjį MAGELLAN SYSTEMS CORP. Kariniams tikslams išleido GPS imtuvą „NAV-1000M“, o imtuvų tiekėju pasirinko 10 NATO šalių narių. Persijos įlankos karą JAV ir koalicijos pajėgos naudojo daugiau nei 3000 NAV-1000M imtuvų. Tada antžeminiai vienetai ir jūrų pėstininkai daugiausia buvo aprūpinti nešiojamaisiais vieno kanalo imtuvais, panašiais į civilinius, ir negalėjo priimti didelio tikslumo signalų. Mūšio metu buvo nuspręsta išjungti SA režimą, todėl priešas taip pat galėjo naudoti didelį tikslumą.
1993 m. viduryje orbitoje jau buvo 24 palydovai, kurių pakako nuolatinei navigacijai bet kurioje Žemės vietoje. Apie galutinį sistemos paleidimą buvo pranešta tik 1995 metų liepą.
1996 m. prezidentas Clintonas patvirtino, kad sistema, kurią maitina Amerikos mokesčių mokėtojai, ir toliau teiks paslaugas civiliams vartotojams visame pasaulyje ir kitą šimtmetį. Buvo paskelbta, kad iki 2006 m. bus panaikintas „prieigos apribojimo“ režimas. Jungtinių Valstijų prezidentas pasilieka teisę sumažinti GPS signalų tikslumą iškilus grėsmei nacionaliniam saugumui.
GPS sistema susideda iš trijų dalių: erdvės, žemės ir naudotojo įranga.
Kosmoso dalis susideda iš 24 palydovų, besisukančių 6 orbitomis. Orbitų pokrypis į žemės pusiaują – 55 laipsniai, kampas tarp orbitos plokštumų – 60 laipsnių. Orbitų aukštis 20180 km, orbitinis periodas 12 val.. Palydovinio siųstuvo galia 50 W. Pristačius patobulintus palydovus, dažni signalo praradimai liko praeityje. GPS palydovai gali užpildyti sistemos spragas judėdami (jei vienas iš jų sugenda). Svarbus palydovo elementas yra atominiai laikrodžiai, rubidis ir cezis, po keturis kiekviename. Palydovai atpažįstami pagal PRN (pseudo atsitiktinį skaičių), kuris rodomas GPS imtuve.
GPS antžeminė dalis susideda iš 4 sekimo stočių, esančių tropinėse salose. Jie seka matomus palydovus ir perduoda duomenis į Kolorado Springso oro pajėgų bazės komandų ir valdymo stotį (MCS), kad būtų galima apdoroti sudėtingais kompiuterių programinės įrangos modeliais. Šie duomenų rinkiniai vadinami efemeriais. Per antžemines stotis duomenys perduodami atgal į palydovus, o po to palydovas juos perduoda GPS imtuvams.
GPS signalai
Visi GPS dažniai yra palydovo pirminio laikrodžio dažnio, 10,23 MHz, kartotiniai. Palydovas perduoda signalus L1=1575,42 MHz ir L2=1227,6 MHz juostose. Signaluose yra dviejų tipų informacija: „navigacijos pranešimai“ ir „pseudoatsitiktinis kodas“ (1 pav.). Kodas yra vienetų ir nulių seka, iš pirmo žvilgsnio atrodytų atsitiktinė, bet besikeičianti pagal sudėtingą dėsnį. Pseudoatsitiktiniame kode yra palydovo numeris (PRN).
Yra dviejų tipų kodai. Civilinis GPS naudoja C/A (angl. Coarse Acquisition) – kodą, perduodamą tik L1 dažniu. Vienas kodo ciklas susideda iš 1023 bitų ir kartojamas 1000 kartų (sek. Karinis didelio tikslumo GPS naudoja P kodą (Precise), kuris perduodamas abiem L1 ir L2 dažniais.
Navigacijos pranešimai perduodami 50 bitų/sek greičiu papildomai moduliuojant nešlio dažnį pagal pseudoatsitiktinį kodą. Kiekvienas pranešimas susideda iš 25 „gabalų“ (puslapių), kurių kiekvienas yra 1500 bitų. Visas viso pranešimo perdavimo ciklas trunka 12,5 minutės. Navigacijos pranešimas apima „efemerido duomenis“ ir „almanacho duomenis“; duomenys apie laiką GPS sistemoje ir jo konvertavimo į visuotinį laiką koeficientai, P kodo raktiniai žodžiai ir specialūs pranešimai. Efemeridai – tai duomenys apie palydovo būklę ir jo orbitos parametrus – koeficientai, kurių pagalba imtuvas apskaičiuoja esamą ir būsimą palydovo padėtį, naudodamas matematinį Keplerio modelį. Be to, šiuose pranešimuose yra palydovinių laikrodžių ir jonosferos sklidimo delsos koeficientai C/A kodo naudotojams. Almanachas yra duomenys apie efemeriją ir likusių sistemoje palydovų būklę (saugomi imtuvo atmintyje). Dėl šių duomenų imtuvas visada „žino“, kur yra visi sistemos palydovai, net kai jų nemato, ir kokius palydovus geriausia naudoti koordinatėms nustatyti.
Kaip GPS imtuvas nustato savo padėtį?
GPS sistema naudoja atstumo iki palydovinių orientyrų nustatymo metodą, kuris nustatomas naudojant pseudoatsitiktinį kodą. Norėdami tai padaryti, imtuvas tuo pačiu metu sugeneruoja savo vidinį kodą, kad jis tiksliai dubliuotų palydovo kodą. Imtuvas lygina laiko skirtumą tarp atitinkamos palydovinio kodo dalies gavimo su ta pačia savo kodo dalimi. Žinodamas laiko poslinkį ir radijo bangų sklidimo greitį, imtuvas gauna atstumą iki palydovo, vadinamą pseudoatstumu, ir iš dviejų atstumų gali nustatyti tikslią jo padėtį (2 pav.) Kodėl „pseudo“? Problema yra užtikrinti, kad imtuvo ir palydovo pseudoatsitiktiniai kodai būtų generuojami tuo pačiu metu. Iš palydovo pusės čia nėra jokių sunkumų. Palydovo laikrodžiai yra labai tikslūs ir reguliuojami pagal signalus iš Žemės. Imtuvo laikrodis yra ne toks tikslus, be to, atsiranda signalo sklidimo vėlavimų jonosferoje, troposferoje ir kt. sukurti bendrą klaidą (3 pav.). Norėdami tai ištaisyti, GPS naudoja nuotolio matavimus iš trečiojo palydovo.
Nustatydamas dvimates koordinates išilgai dviejų vienodo atstumo apskritimų, imtuvas „nežino“, ar jis iš tikrųjų yra ant jų, ar ne. Pavyzdžiui, jei imtuvo laikrodis lėtas, tikroji padėtis bus arčiau, bet kiekvienu atveju proporcingai arčiau kiekvieno palydovo. Įvedę padėties liniją iš 3-iojo palydovo, galime gauti vienareikšmį rezultatą. GPS imtuvas turi programą, kuri paima trijų padėties linijų informaciją ir ją išsprendžia algebriškai. Šie skaičiavimai pateikia trijų nežinomųjų lygčių: ilgumos, platumos ir laikrodžio paklaidos sprendimus. Štai kodėl 2D koordinatėms nustatyti reikia mažiausiai 3 palydovų, o 3D – 4.
Apie tikslumą
GPS vartotoją domina tikrasis sistemos tikslumas; kitaip tariant, kaip arti galite pasiekti navigacijos pavojų, pasikliaujant tik GPS imtuvu? Deja, aiškaus atsakymo į šį klausimą nėra. Taip yra dėl statistinio GPS klaidos pobūdžio.
GPS klaidų priežastys
SA režimas
Taikos metu prideda kelių dešimčių metrų paklaidą; Ypatingais atvejais gali būti šimtų metrų paklaidos. (Už sistemos veikimą milijonams vartotojų yra atsakinga JAV vyriausybė, todėl galima tikėtis, kad toks didelis tikslumo sumažinimas nebus atliktas be pakankamai rimtų priežasčių.) Pasiekta chaotiškai keičiant pseudoatsitiktinio perdavimo laiką. kodas. Klaidos, kylančios iš SA, yra atsitiktinės ir vienodai tikėtinos kiekviena kryptimi. SA taip pat turi įtakos GPS krypties ir greičio tikslumui. Dėl šios priežasties stacionarus imtuvas dažnai rodys šiek tiek skirtingą greitį ir kryptį. Taigi tam tikru mastu SA poveikio mastą galima įvertinti pagal periodinius GPS krypties ir greičio pokyčius.
Radijo bangų sklidimo vėlavimas jonosferoje ir troposferoje
Radijo bangų greitis vakuume yra pastovus, tačiau kai signalas patenka į atmosferą, jis pasikeičia. Signalų iš skirtingų palydovų delsa skiriasi. Radijo bangų sklidimo klaidos priklauso nuo atmosferos būklės ir palydovo aukščio virš horizonto: kuo žemesnis palydovas, tuo ilgesnį kelią jo signalas nukeliauja per atmosferą ir tuo didesnis iškraipymas. Dauguma imtuvų neleidžia naudoti signalų iš palydovų, kurių aukštis virš horizonto mažesnis nei 7,5. (Atmosferos trukdžiai priklauso ir nuo paros laiko: po saulėlydžio sumažėja jonosferos tankis ir jos įtaka radijo signalams (šis reiškinys gerai žinomas trumpųjų bangų radijo operatoriams).
Atsispindėjusio signalo poveikis (daugiatakas)
Be tiesioginio signalo iš palydovo, imtuvas taip pat gali priimti signalus, atsispindinčius nuo uolų, pastatų ir praplaukiančių laivų. Jei tiesioginį signalą iš imtuvo blokuoja antstatai arba takelažas, atspindėtas signalas gali būti stipresnis. Šis signalas nukeliauja ilgesnį kelią, o imtuvas „mano“, kad jis yra toliau nuo palydovo, nei yra iš tikrųjų. Šios paklaidos yra daug mažesnės nei 100 m, nes tik arti esantys objektai gali suteikti pakankamai stiprų aidą.

Palydovinė geometrija
Priklauso nuo vietos, palyginti su palydovų imtuvu, pagal kurį nustatoma padėtis. Jei imtuvas „pagavo“ keturis palydovus ir jie visi yra šiaurėje, vadinasi, palydovo geometrija yra bloga. Rezultatas – iki 90-150 m paklaida ar net nesugebėjimas nustatyti koordinačių. (Visi keturi matmenys yra iš tos pačios krypties, o jų susikirtimo plotas per didelis; 4 pav.)
Naudojant tuos pačius 4 palydovus, tikslumas žymiai padidėja, jei jie yra tolygiai išdėstyti horizonto šonuose. Šiuo atveju net su SA tikslumas siekia 30 m ir daugiau.
Palydovo geometrija matuojama PDOP (Position Dilution Of Precision) arba HDOP (Horizontal Dilution Of Precision) koeficientu. Ideali palydovų vieta atitinka PDOP=1; didelės reikšmės rodo prastą palydovo geometriją. PDOP naudojamas kaip kitų klaidų daugiklis. Kiekvienas imtuvo išmatuotas pseudoatstumas turi savo paklaidą, priklausomai nuo atmosferos trukdžių, efemerų, SA klaidų, atspindėto signalo ir kt. Taigi, jei apskaičiuotos šių klaidų vertės yra 50 m ir PDOP = 1,5, tada tikimasi vietos paklaida bus 75 m.
GPS imtuvai informaciją pateikia skirtingai, kad įvertintų tikslumą naudodami PDOP. Be HDOP, naudojamas GQ (geometrinė kokybė, atvirkštinė HDOP) arba kokybinis įvertinimas taškais. Daugelis šiuolaikinių imtuvų rodo EPE (apskaičiuotą padėties klaidą) tiesiai atstumo vienetais. EPE atsižvelgia į palydovų vietą ir signalo klaidų prognozę kiekvienam palydovui, priklausomai nuo SA, atmosferos sąlygų, palydovo laikrodžio klaidas, perduodamas kaip efemerinės informacijos dalis.
Palydovo geometrija taip pat tampa problema, kai GPS imtuvas naudojamas transporto priemonėse, tankiuose miškuose, kalnuose ar šalia aukštų pastatų. Kai signalai iš atskirų palydovų bus blokuojami, likusių palydovų padėtis lems, kiek tiksli bus GPS padėtis (o jų skaičius parodys, ar padėtį apskritai galima nustatyti).
Geras GPS imtuvas parodys ne tik kurie palydovai yra naudojami, bet ir kur jie yra (azimutą ir aukštį), todėl galėsite nustatyti, ar tam tikram palydovui kyla sunkumų. 5 paveiksle parodytas prastos palydovo padėties GPS ekrane pavyzdys: palydovai Nr. 22, 01 ir 09 nematomi. Tokioje situacijoje galima tikėtis didelių ilgumos paklaidų; platuma tikriausiai bus nustatyta gana tiksliai.
Kiekybinis tikslumas
Paprastas testas, norint aiškiai pamatyti GPS imtuvo tikslumą, yra periodiškai įrašyti rodmenis iš stacionaraus imtuvo pakankamai ilgą laiką. Pavyzdžiui, kartą per 2 minutes. per dieną. Tai padaryti lengviau, jei turite braižytuvą arba kompiuterį, prijungtą prie GPS. Nubraižę gautas koordinates planšetėje, gauname vaizdą, panašų į Fig. 7.
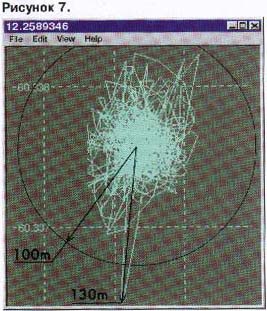
Manoma, kad GPS padėties pasiskirstymas gana gerai atitinka įprastą (Gauso) dėsnį. Tai reiškia, kad atliekant didesnį matavimų skaičių, paklaida arba sisteminė paklaida yra lygi nuliui. Civilinis GPS užtikrina tikslumą be SA 15 metrų RMS, o SA režimu 2DRMS=100 m. Ką tai reiškia? RMS (Root Mean Square) – kvadratinė šaknis iš ilgumos ir platumos nuokrypių kvadratų sumos, padalytos iš matavimų skaičiaus. 65% taškų patenka į RMS spindulio apskritimą. 2DRMS reiškia dvigubą RMS. Erdvinio dvimačio Gauso skirstinio atveju 95% taškų patenka į intervalą plius arba minus 2DRMS, jei pasiskirstymas yra elipsinis (įvairios platumos ir ilgumos paklaidos), o su apskritimu - iki 98%. GPS padėties pasiskirstymas tampa elipsinis, jei dangus iš vienos pusės uždarytas signalams.
GPS ir „Problema-2000“
GPS valdymas žada, kad visos antžeminės tarnybos bus pilnai parengtos, o ši problema neturės įtakos palydovų signalų perdavimui. Kitas svarbus GPS sistemos įvykis, žinomas kaip „GPS sistemos laiko keitimas“, įvyks 1999 m. rugpjūčio 21–22 d. vidurnaktį, kai baigsis 1024 savaičių trukmės palydovinės navigacijos pranešimų keitimo ciklas ir iš naujo prasidės atgalinis skaičiavimas.
Daugumos šiuolaikinių imtuvų gamintojai teigia, kad jų gaminiai yra apsaugoti nuo šių problemų, tačiau dėl saugumo senesnių GPS modelių savininkams patariama pasitarti su tiekėjais. Autorius mano, kad po 1999 m. rugpjūčio 22 d. ir gruodžio 31 d. vidurnakčio (Grinvičo laiku) turėtumėte tuo pačiu metu patikrinti GPS rodmenų teisingumą naudodami kitas navigacijos priemones. Ypač jei imtuvas rodo neteisingą datą ar laiką.
Išvada
Dažniausiai GPS užtikrina didelį tikslumą, kelių dešimčių metrų atstumu, kurio pakanka navigacijai įprastomis sąlygomis. Tačiau vartotojui svarbu, kad kai kuriais momentais galimi nukrypimai iki kabelio ilgio ar daugiau. Tokių klaidų tikimybė yra labai maža, tačiau jos negalima pamiršti. Visada rekomenduojama naudoti daugiau nei vieną navigacijos įrankį. Spręsdami dėl GPS rodmenų pasitikėjimo laipsnio, galite atsižvelgti į šiuos požymius:
- Imtuvo informacija apie palydovų buvimo vietą. Didžiausios paklaidos galimos nepalankiai derinant didžiausių veiksnių, turinčių įtakos tikslumui ir, visų pirma, palydovo geometrijai, verčių. Jūsų imtuve, kuris paprastai rodydavo EPE 20-40 m, atsirasdavo 60 m ar daugiau.);
- dangaus matomumas virš imtuvo antenos;
- GPS padėties pasikeitimas per ankstesnį laikotarpį (braižymas atliktas dideliu mastu).
- kurso ir greičio atitikimas pagal GPS kompaso ir žurnalo rodmenis.
- objektų, atspindinčių signalą, buvimas.
Be to, tikslinga pasakyti, kad žemėlapio koordinačių sistemos (Map Datum) yra susijusios su skirtingais žemės elipsoido modeliais, naudojamais kuriant žemėlapius įvairiose šalyse. Skirtumas tarp jų gali siekti 500 m.. Dirbdamas su GPS ir žemėlapiu vartotojas turi į tai atsižvelgti ir atlikti atitinkamus koregavimus.
Ir paskutinis dalykas. Anksčiau buvo atsižvelgta tik į paties GPS imtuvo tikslumą. O maksimalios navigacijos klaidos naudojant GPS yra sumuojamos iš didžiausių visos grandinės klaidų: palydovai – imtuvas – vartotojas – žemėlapis – vartotojas.
Už pagalbą rengiant medžiagą autorius dėkoja įmonėms NAVICOM, TRANSAS MARINE, ALTAIR ir p. Peter Dan (Teksaso valstijos universitetas), (www.host.cc.utexas.edu.ftp?pub/grg/gcraft/notes). /gps/gps.html).
Leidinys parengtas remiantis medžiaga iš interneto ir Dahl, Bonnie. GPS naudotojo vadovas – pasaulinė padėties nustatymo sistema. Richardson Marine Publishing, 1993 m.
Aleksandras Samoilovas
Planavome sukurti aplikaciją paieškos žaidimams – žaidimams, kuriuose reikia rasti vietas realiame pasaulyje.
Pirmiausia reikėjo tikslaus įrankio taškų rinkimui ir maršrutų kūrimui. Tiesiog jų nurodyti žemėlapyje netiko, nes... geografinių žymų paklaida siekia 200 metrų – žmogus galėjo ateiti į koordinates ieškodamas smulkmenos, tačiau paaiškėjo, kad iki vietos dar buvo šimtai laiptelių. Kad vartotojai nebūtų priversti blaškytis, buvo nuspręsta sukurti koordinačių paėmimo su telefonais sistemą vietoje.
Turėdami patirties kuriant tokią Android operacinei sistemai skirtą sistemą ir nukentėję su jos geografinės padėties nustatymo paslaugomis, manėme, kad tai padaryti su iOS būtų lengviau (atrodo, iPhone yra labai panašūs) ir tiksliau (idealiu atveju nebijotume atsisakyti iPhone miške, kad vėliau jį būtų galima rasti pagal kompasą).
Norėdami patikrinti šias prielaidas, parašėme prototipą, kuris nukreipė vartotoją su rodykle į vietą, kur buvo paimtos koordinatės, ir tuo pačiu padarė įdomias išvadas apie įmontuoto kompaso ir GPS tikslumą.
Koordinačių nustatymo tikslumas
Mūsų atlikti bandymai parodė, kad maksimalus GPS tikslumas skirtinguose iPhone telefonuose skiriasi, juk lustų gamintojai nestovi vietoje.Tai yra didžiausias tikslumas, kurį pasiekėme geros sąlygos priėmimas:
- iPhone 3Gs - 17m,
- iPhone 4 - 10m,
- iPhone 4s ir 5 - 5m (ar tikrai GLONASS turi poveikį?!).
Daugelyje instrukcijų rašoma, kad geros sąlygos apima ir medžių nebuvimą. Tačiau mūsų bandymai vasarą spygliuočių-lapuočių miške neparodė jokių pastebimų nukrypimų.
Buvo įdomu suprasti, kaip iPhone duoda koordinates ten, kur GPS negaunama. Jokių staigmenų čia nebuvo.
Yra gana daug gerų straipsnių, kuriuose aprašoma, kaip GPS ir geografinė padėtis veikia išmaniuosiuose telefonuose, kai GPS nėra.
.
Pasirodo, kai telefonas nepaima GPS, location.horizontalAcuracy rodo ±1414 metrų, naudojant operatoriaus bazinės stoties informaciją. Šį tikslumą užtikrina GSM tinklai.
Jei netoliese yra „Wi-Fi“ taškų, pagal kuriuos nustatomos geografinės koordinatės, tada, kaip taisyklė, tikslumas padidėja iki šimtų metrų, jei yra tik vienas „Wi-Fi“ taškas, arba iki dešimčių metrų, jei jų yra keletas. .
Mes nepastebėjome jokio skirtumo tarp iPhone 4S ir 5, tačiau pastebėjome, kad jie daug dažniau atnaujina vietą. Todėl priartėjus prie nufotografuoto taško matosi, kaip mažėja atstumą iki taikinio nurodantis skaičius (30, 29, 28...). Tai sukuria malonų sėkmės jausmą.
Kryptis
 Be to, norint nuvesti žmogų į vietą, be paskirties taško koordinačių, reikia žinoti ir kryptį, kuria eiti. Mes nesvarstome žmogaus vedimo per transporto tinklą problemos, kaip tai daro navigatoriai, mes sprendžiame žmogaus vedimo į vietą problemą, net jei nieko nežinome apie jį supančius transporto tinklus.
Be to, norint nuvesti žmogų į vietą, be paskirties taško koordinačių, reikia žinoti ir kryptį, kuria eiti. Mes nesvarstome žmogaus vedimo per transporto tinklą problemos, kaip tai daro navigatoriai, mes sprendžiame žmogaus vedimo į vietą problemą, net jei nieko nežinome apie jį supančius transporto tinklus. Kad būtų rodoma rodyklė, rodanti į vietą, naudojama informacija apie telefono padėtį Šiaurės ašigalio atžvilgiu. Šią informaciją pateikia įrenginio kompasas, pasirodęs „iPhone“, pradedant 3GS.
Tuo pagrindu pastatėme kompasą-navigatorių, kurio rodyklė rodo į vietą.
Ką galima patobulinti
Įdomu tai, kad kompaso tikslumas yra visos krypties sistemos kliūtis.Galime kiek norime tiksliai žinoti, kokiu kursu judame šiuo metu, tačiau norint šią informaciją parodyti vartotojui rodyklės pavidalu, būtina kuo tiksliau suprasti paties įrenginio orientaciją į šiaurę. . Nors kompasas neturi zonų, kuriose jis neveikia, jis lengvai reaguoja į įvairius trukdžius ir anomalijas, taip pat įrenginio pasvirimo kampus, o tai ypač pastebima judant. Mes taip pat nusprendėme kovoti su šia problema.
Norėdami paaiškinti, naudojome kelio kampą arba location.course, kalbant apie iOS API. Tai leido žymiai padidinti kompaso tikslumą judant.
Tačiau iškilo problemų. Pataisa veikia remiantis prielaida, kad žmonės vaikšto su telefonu, laikydami jį aukštyn kojomis (remdamiesi įvairių eksperimentų rezultatais supratome, kad iPhone nešiotojams taip yra išties pėsčiomis). Bet jei žmogus keliauja automobiliu ar viešuoju transportu, situacija, kai telefonas yra šonu, palyginti su važiavimo kryptimi, pasitaiko daug dažniau. Todėl pakeitimas turi būti išjungtas:
- dideliu greičiu (nes telefonas greitai praskrenda virš įvairių trukdžių ir anomalijų ir reaguoti į juos reiškia, kad ant trikdžių sukuriami trukdžiai);
- jei pataisa yra didesnė nei 75 g. (kadangi čia teks gūžčioti pečiais, vargu ar įmanoma ką nors tikslesnio pasiūlyti).
Žinoma, yra ir sudėtingesnių metodų, kaip paaiškinti rodyklės rodmenis - galite įgyvendinti tikrą negyvą paleidimą (nuoroda, kurios dar neradau). Tačiau tikimės, kad geležies gamintojai šią problemą išspręs geriau. O mūsų bandymai parodė, kad kompaso rodyklė su nedideliais programinės įrangos pataisymais atlieka savo funkciją – nuveda žmogų į vietą.
Eksperimentuokite
Norėdami patikrinti prototipo tikslumą, nusprendėme atlikti nedidelį eksperimentą (oi, kiek eksperimentų atlikome).Tikėjimas sukurto prototipo patikimumu sukėlė nesutarimų komandoje. Todėl labiausiai tuo tikėjęs kolega (jis jį sukūrė) išdrįso savo iPhone kaip patikimumo įrodymą palaidoti miške (nieko neįprasto, visi taip daro). Išvažiavo su dviem įrenginiais, išsinuomojo vietą ir grįžęs padovanojo vieną iPhone.
Ėjau per mišką, sekdama rodyklę ekrane. Kai ekrane buvo parodytas likęs 0 metrų atstumas, pažiūrėjau žemyn ir pamačiau nufotografuotą vietą. Paaiškėjo, kad kolega nusprendė nerizikuoti savo telefonu, o pasodino manekeną (niekšą), tačiau eksperimentas tikrai pavyko.

Šis prototipas pasirodė esąs naudinga dalijimosi vieta programa, tačiau tai yra kito įrašo tema.
UPD
Nedidelis papildymas atsakant į gautas pastabas.
Nebandėme lyginti „iPhone“ GPS rodmenų su jokiomis atskaitos vertėmis.
Bandėme įvertinti rezultatus, gautus iš skirtingų iPhone, kurie buvo toje pačioje situacijoje, bet skirtingu metu.
Ištyrėme, kuo pirmojo matavimo rezultatai skiriasi nuo vėlesnių matavimų, atliktų panašiais ar identiškais telefonais.
Buvo atlikta dešimtys bandymų skirtingos sąlygos. Įgytą patirtį galima trumpai apibendrinti dviem sakiniais:
- Jei paimsite koordinates vienu telefonu ir pasieksite jas naudodami kitą, tada geromis sąlygomis būsite iki 3-10 m atstumu nuo tikslo.
- Reikšmė location.horizontalAccuracy gana tiksliai atspindi tikrovę, darant prielaidą, kad parodo maksimalų atstumą iki taško, gauto naudojant kitą telefoną.