Система супутникової навігації GPS – принцип, схема, застосування
Супутникова навігація GPS давно вже є стандартом для створення систем позиціонування та активно застосовується у різних трекерах та навігаторах. У проектах Arduino GPS інтегрується за допомогою різних модулів, які не потребують знання теоретичних основ. Але справжньому інженеру має бути цікаво розібратися з принципом та схемою роботи GPS, щоб краще розуміти можливості та обмеження цієї технології.
Схема роботи GPS
GPS – це супутникова навігаційна система, розроблена Міністерством оборони США, яка визначає точні координати та час. Працює у будь-якій точці Землі в будь-яких погодних умовах. GPS складається з трьох частин – супутників, станцій на Землі та приймачів сигналу.
Ідея створення супутникової навігаційної системи зародилася ще у 50-ті роки минулого сторіччя. Американська група вчених, яка спостерігає за запуском радянських супутників, зауважила, що при наближенні супутника частота сигналу збільшується і зменшується при його віддаленні. Це дозволило зрозуміти, що можна виміряти становище і швидкість супутника, знаючи свої координати Землі, і навпаки. Величезну роль розвитку навігаційної системи зіграв запуск супутників на низьку навколоземну орбіту. А 1973 року було створено програму «DNSS» («NavStar»), за цією програмою супутники запускалися на середню навколоземну орбіту. Назву GPS програма отримала в тому ж 1973 році.
Система GPS на даний момент використовується не лише у військовій галузі, а й у цивільних цілях. Сфер застосування GPS багато:
- Мобільний зв'язок;
- Тектоніка плит – відбувається стеження за коливаннями плит;
- Визначення сейсмічної активності;
- Супутникове відстеження транспорту – можна проводити моніторинг за становищем, швидкістю транспорту та контролювати їх рух;
- Геодезія – визначення точних меж земельних ділянок;
- Картографія;
- Навігація;
- Ігри, геотегінт та інші розважальні області.
Найважливішим недоліком системи вважатимуться неможливість отримання сигналу за певних умов. Робочі частоти GPS лежать у дециметровому діапазоні хвиль. Це призводить до того, що рівень сигналу може знизитися через високу хмарність, щільне листя дерев. Радіоджерела, глушилки, а в окремих випадках навіть магнітні бурі також можуть заважати нормальній передачі сигналу. Точність визначення даних погіршуватиметься у приполярних районах, оскільки супутники невисоко піднімаються над Землею.
Навігація без GPS
 Основним конкурентом GPS є російська система ГЛОНАСС (глобальна навігаційна супутникова система). Свою повноцінну роботу система розпочала з 2010 року, спроби активно використовувати її робилися з 1995 року. Існує кілька відмінностей між двома системами:
Основним конкурентом GPS є російська система ГЛОНАСС (глобальна навігаційна супутникова система). Свою повноцінну роботу система розпочала з 2010 року, спроби активно використовувати її робилися з 1995 року. Існує кілька відмінностей між двома системами:
- Різні кодування – американці використовують CDMA, для російської системи використовують FDMA;
- Різні габарити пристроїв – ГЛОНАСС використовує складнішу модель, тому підвищується енергоспоживання та розміри пристроїв;
- Розстановка та рух супутників на орбіті – російська система забезпечує ширший охоплення території та точніше визначення координат та часу.
- Термін служби супутників – американські супутники робляться якіснішими, тому вони служать довше.
Крім ГЛОНАСС і GPS існують інші менш популярні навігаційні системи - європейський Galileo і китайський Beidou.
Опис GPS
Принцип роботи GPS
Працює система GPS в такий спосіб – приймач сигналу вимірює затримку поширення сигналу від супутника до приймача. З отриманого сигналу приймач отримує дані про місцезнаходження супутника. Для визначення відстані від супутника до приймача затримка сигналу збільшується на швидкість світла.
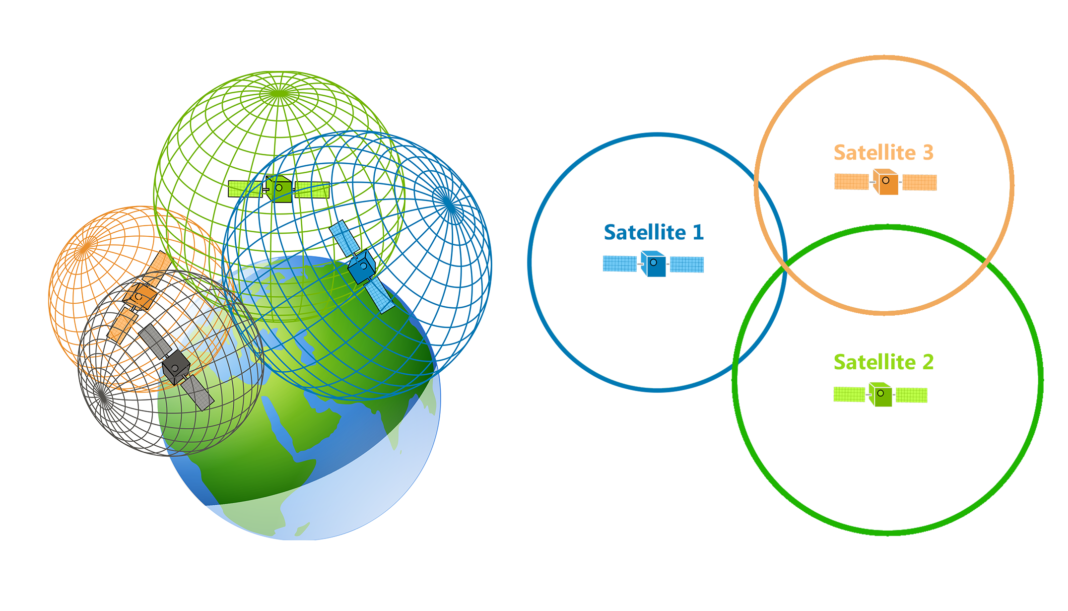 З погляду геометрії роботу навігаційної системи можна проілюструвати так: кілька сфер, у яких перебувають супутники, перетинаються й у них перебуває користувач. Радіус кожної із сфер відповідно дорівнює відстані раніше видимого супутника. Сигнали від трьох супутників дозволяють отримати дані про широту та довготу, четвертий супутник дає інформацію про висоту об'єкта над поверхнею. Отримані значення можна звести до системи рівнянь, у тому числі можна знайти координату користувача. Таким чином, для отримання точного розташування необхідно провести 4 виміри дальностей до супутника (якщо виключити неправдоподібні результати, достатньо трьох вимірів).
З погляду геометрії роботу навігаційної системи можна проілюструвати так: кілька сфер, у яких перебувають супутники, перетинаються й у них перебуває користувач. Радіус кожної із сфер відповідно дорівнює відстані раніше видимого супутника. Сигнали від трьох супутників дозволяють отримати дані про широту та довготу, четвертий супутник дає інформацію про висоту об'єкта над поверхнею. Отримані значення можна звести до системи рівнянь, у тому числі можна знайти координату користувача. Таким чином, для отримання точного розташування необхідно провести 4 виміри дальностей до супутника (якщо виключити неправдоподібні результати, достатньо трьох вимірів).
Поправки отримані рівняння вносить розбіжність між розрахунковим і фактичним становищем супутника. Похибка, що виникає внаслідок цього, називається ефемеридною та становить від 1 до 5 метрів. Також свій внесок роблять інтерференція, атмосферний тиск, вологість, температура, вплив іоносфери та атмосфери. Сумарно сукупність помилок може довести похибку до 100 метрів. Деякі помилки можна усунути математично.
Щоб зменшити всі помилки, використовують диференціальний режим GPS. У ньому приймач отримує радіоканалу всі необхідні поправки до координат від базової станції. Підсумкова точність виміру досягає 1-5 метрів. При диференціальному режимі існує два методи коригування отриманих даних - це корекція самих координат і корекція навігаційних параметрів. Перший метод використовувати незручно, тому що всі користувачі повинні працювати по одним і тим же супутникам. У другий випадок значно збільшується складність самої апаратури визначення місцезнаходження.
Існує новий клас систем, який збільшує точність виміру до 1 см. Величезний вплив на точність кут між напрямками на супутники. При великому куті розташування буде визначатися з більшою точністю.
Точність виміру може бути штучно знижена Міністерством оборони США. Для цього на пристрої навігації встановлюється спеціальний режим S/A – обмежений доступ. Режим розроблено у військових цілях, щоб не дати противнику переваги у визначенні точних координат. З травня 2000 року режим обмеженого доступу було скасовано.
Усі джерела помилок можна розділити на кілька груп:
- Похибка у обчисленні орбіт;
- Помилки, пов'язані із приймачем;
- Помилки, пов'язані з багаторазовим відображенням сигналу від перешкод;
- Іоносфера; тропосферні затримки сигналу;
- Геометрія розташування супутників.
Основні характеристики
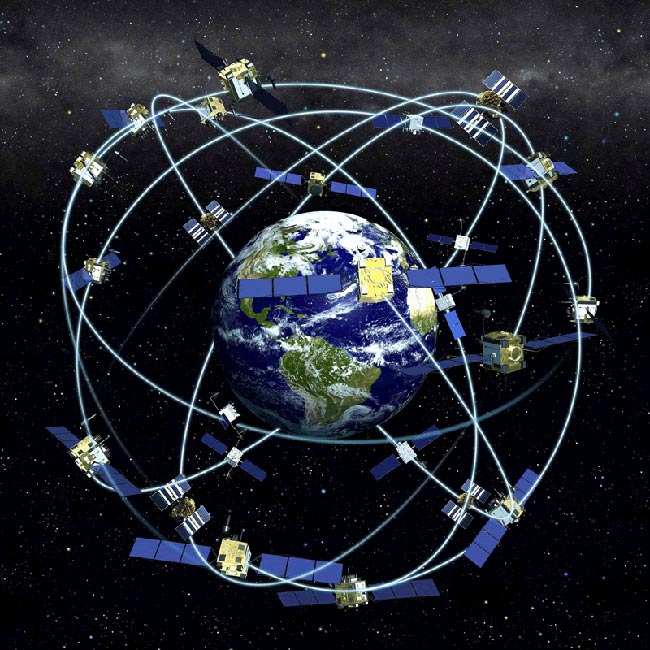
У систему GPS входить 24 штучні супутники Землі, мережа наземних станцій спостереження та навігаційні приймачі. Станції спостереження потрібні визначення та контролю параметрів орбіт, обчислення балістичних характеристик, регулювання відхилення від траєкторій руху, контроль апаратури бору космічних апаратів.
Характеристики навігаційних систем GPS:
- Кількість супутників – 26, 21 основний, 5 запасних;
- Кількість орбітальних площин – 6;
- Висота орбіти – 20 000 км;
- Термін експлуатації супутників – 7,5 років;
- Робочі частоти - L1 = 1575,42 МГц; L2=12275,6МГц, потужність 50 Вт та 8 Вт відповідно;
- Надійність навігаційного визначення – 95%.
Навігаційні приймачі бувають кількох типів – портативні, стаціонарні та авіаційні. Приймачі також характеризуються рядом параметрів:
- Кількість каналів – у сучасних приймачах використовується від 12 до 20 каналів;
- Тип антени;
- наявність картографічної підтримки;
- Тип дисплея;
- Додаткові функції;
- Різні технічні характеристики - матеріали, міцність, захист від вологи, чутливість, обсяг пам'яті та інші.
Принцип дії самого навігатора – насамперед пристрій намагається зв'язатися з навігаційним супутником. Як тільки зв'язок буде встановлений, відбувається передача альманаху, тобто інформації про орбіти супутників, що знаходяться в рамках однієї системи навігації. Зв'язки з одним тільки супутником недостатньо для отримання точного розташування, тому супутники, що залишилися, передають навігатору свої ефемериди, необхідні для визначення відхилень, коефіцієнтів обурення та інших параметрів.
Холодний, теплий та гарячий старт GPS навігатора
Увімкнувши навігатор вперше або після тривалої перерви, починається довге очікування для отримання даних. Довгий час очікування пов'язаний з тим, що в пам'яті навігатора відсутні або застаріли альманах та ефемеріди, тому пристрій повинен виконати ряд дій щодо отримання або оновлення даних. Час очікування або так званий час холодного старту залежить від різних показників – якість приймача, стан атмосфери, шуми, кількість супутників у зоні видимості.
Щоб розпочати свою роботу, навігатор повинен:
- Знайти супутник та встановити з ним зв'язок;
- Отримати альманах та зберегти його в пам'яті;
- Отримати ефемериди від супутника та зберегти їх;
- Знайти ще три супутники і встановити з ними зв'язок, отримати від них ефемеріди;
- Обчислити координати за допомогою ефемерид та розташування супутників.
Тільки пройшовши весь цей цикл, пристрій почне працювати. Такий запуск і називається холодним стартом.
Гарячий старт значно відрізняється від холодного. У пам'яті навігатора вже є актуальний на даний момент альманах та ефемеріди. Дані для альманаху дійсні протягом 30 днів, ефемерид – протягом 30 хвилин. З цього виходить, що пристрій вимикався на нетривалий час. При гарячому старті алгоритм буде простіше – пристрій встановлює зв'язок із супутником, за необхідності оновлює ефемериди та обчислює місцезнаходження.
Існує теплий старт – у цьому випадку альманах є актуальним, а ефемериди потрібно оновити. Часу на це витрачається трохи більше ніж на гарячий старт, але значно менше, ніж на холодний.
Обмеження на купівлю та використання саморобних модулів GPS
Російське законодавство вимагає від виробників зменшувати точність визначення приймачів. Працювати з незагрубленою точністю може здійснюватись лише за наявності у користувача спеціалізованої ліцензії.
 Під забороною Російської Федерації перебувають спеціальні технічні засоби, призначені для негласного отримання (СТС НПИ). До таких належать GPS трекери, які використовуються для негласного контролю за переміщенням транспорту та інших об'єктів. Основна ознака незаконного технічного засобу – його скритність. Тому перед придбанням пристрою потрібно уважно вивчити його характеристики, зовнішній вигляд, наявність прихованих функцій, а також переглянути необхідні сертифікати відповідності.
Під забороною Російської Федерації перебувають спеціальні технічні засоби, призначені для негласного отримання (СТС НПИ). До таких належать GPS трекери, які використовуються для негласного контролю за переміщенням транспорту та інших об'єктів. Основна ознака незаконного технічного засобу – його скритність. Тому перед придбанням пристрою потрібно уважно вивчити його характеристики, зовнішній вигляд, наявність прихованих функцій, а також переглянути необхідні сертифікати відповідності.
Також важливо, як продається пристрій. У розібраному вигляді прилад може не належати до СТС НПІ. Але при збиранні готовий пристрій може ставитися до заборонених.